This page was generated from docs/tutorials/wavesense_training.ipynb.
Interactive online version:
![]()
WaveSense: Training a Spiking Neural Network with Temporal Convolutions
In this notebook we will demonstrate how to create and train a WaveSense network as described in https://arxiv.org/pdf/2111.01456.pdf.
The key feature of this model is its temporal convolution layer which is inspired by the famous WaveNet architecture from Google: https://arxiv.org/pdf/1609.03499.pdf and https://deepmind.com/blog/article/wavenet-generative-model-raw-audio
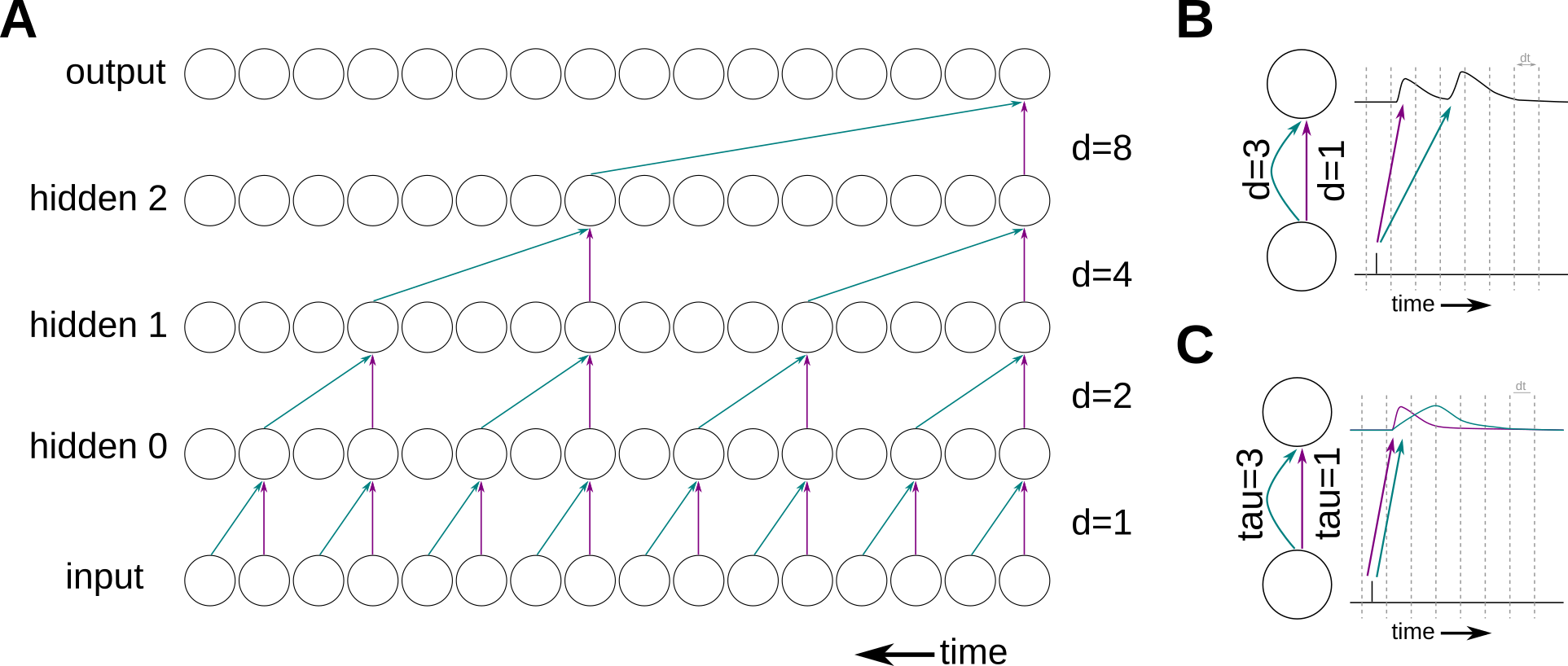
WaveNet uses so called “dilated convolutional layers” as depicted in panel A. Dilated convolutional layers are basically the same as a normal convolutional layers, execpt that the kernel is causal and sparse in the time domain. By choosing the sparseness (dilations) in a smart way, no information is lost but much less parameters have to be trained.
We adapt this method in our spiking neural network implementation. As can be seen in panel A, a dilated connection means that there is a connection which is fast (instantaneous) and one which is delayed by the dilation value. In order to correctly implement that in a SNN, we could simply use an axonal delay for the dilated connection (panel B). Unfortunately, axonal delays are not supported by our hardware. Hence, we chose to represent the fast connection with a synapse having a short time constant and the dilated connection having a long time constant (panel C). Note that this means that our dilated neuron model differs from the standard LIF neuron model as it has two synaptic currents with different time constants.
There are additional parts to the model worth mentioning. The dilated connection happens in a computational block called “WaveBlock”. Moreover, the WaveBlock uses a residual connection to connect to the next block and also a skip connection directly to the readout layer.
The WaveBlock looks like this:
A single WaveBlock
▲
To next block │ ┌────────────┐
┌──────────────────┼────────────┤ WaveBlock ├───┐
│ │ └────────────┘ │
│ Residual path .─. │
│ ─ ─ ─ ─ ─ ─▶( + ) │
│ │ `─' │
│ ▲ │
│ │ │ │
│ .─────. │
│ │ ( Spike ) │
│ `─────' │
│ │ ▲ │
│ │ │
│ │ ┌──────────┐ │
│ │ Linear │ │
│ │ └──────────┘ Skip path │ Skip
│ ▲ ┌──────┐ .─────. │ connections
│ │ ├──────▶│Linear│──▶( Spike )──┼──────────▶
│ │ └──────┘ `─────' │
│ │ .─────. │
│ ( Spike ) │
│ │ `─────' │
│ ╲┃╱ │
│ │ ┃ Dilation │
│ ┌──────────┐ │
│ │ │ Linear │ │
│ └──────────┘ │
│ │ ▲ │
│ ─ ─ ─ ─ ─ ─ ─│ │
└──────────────────┼─────────────────────────────┘
│ From previous block
│
The WaveSense network stacks multiple such WaveBlocks and adds a two layered readout:
The WaveSense network
Threshold
on output
.───────.
(Low-pass )────▶
`───────'
▲
│
┌──────────┐
│ Linear │
└──────────┘
▲
│
.─────.
( Spike )
┌──────────────────────┐ Skip `─────'
│ ├┐ outputs ▲
│ WaveBlock stack │├┬───┐ │
│ ││├┬──┤ .─. ┌──────────┐
└┬─────────────────────┘││├──┴┬───▶( + )─▶│ Linear │
└┬─────────────────────┘││───┘ `─' └──────────┘
└┬─────────────────────┘│
└──────────────────────┘
▲
│
.─────.
( Spike )
`─────'
▲
│
┌──────────┐
│ Linear │
└──────────┘
▲ Spiking
│ input
Now, that the model is introduced, let’s get started and define the task.
[1]:
import sys
!{sys.executable} -m pip install --quiet matplotlib
import matplotlib.pyplot as plt
%matplotlib inline
plt.rcParams["figure.figsize"] = [12, 4]
plt.rcParams["figure.dpi"] = 300
Temporal XOR Task
For demonstation purposes, we want to train the WaveSense model on a toy task which is representative to the tasks it is meant to be applied. We chose the temporal version of logical XOR as it easy but still requires temporal memory, which is the key problem solved by WaveSense.
We create a TemporalXOR task of length T_total. The created input spike trains contains two stimuli containing num_channels neurons of duration T_stim. Between the presentation of the two stimuli is a certain temporal delay which is randomized around T_delay +- T_randomize.
| T_Stim | random delay | T_Stim |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| |
| |
| FIRST STIM ... Silence ... SECOND STIM ... Silence ... |
| |
| |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| T_total |
Time ->
The supervision signal is equal to logical XOR(stim_0, stim_1):
targets = {
XOR(Stim_A, Stim_A) = 0
XOR(Stim_A, Stim_B) = 1
XOR(Stim_B, Stim_A) = 1
XOR(Stim_B, Stim_B) = 0
}
The problem which has to be solved is two-fold.
1) It's non-linear.
2) It requires temporal memory. The model can only make a decision after both simuli are presented meaning it has to remember the first stimulus for at least the delay period.
[2]:
from torch.utils.data import Dataset
import torch
import numpy as np
class TemporalXOR(Dataset):
def __init__(
self,
T_total=100,
T_stim=20,
T_delay=40,
T_randomize=20,
max_num_spikes=15,
num_channels=16,
):
self.T_total = T_total
self.T_stim = T_stim
self.T_delay = T_delay
self.T_randomize = T_randomize
self.max_num_spikes = max_num_spikes
self.num_channels = num_channels
# two different stimuli
self.inp_A = torch.randint(
0, self.max_num_spikes + 1, (self.T_stim, self.num_channels)
)
self.inp_A[:, : self.num_channels // 2] = 0
self.inp_B = torch.randint(
0, self.max_num_spikes + 1, (self.T_stim, self.num_channels)
)
self.inp_B[:, self.num_channels // 2 :] = 0
# stimuli sequence for logical XOR
self.key_stim_map = {
0: [self.inp_A, self.inp_A],
1: [self.inp_A, self.inp_B],
2: [self.inp_B, self.inp_A],
3: [self.inp_B, self.inp_B],
}
# supervision signal for logical XOR
self.key_target_map = {0: 0, 1: 1, 2: 1, 3: 0}
def __getitem__(self, key):
# generate input sample as
# [FIRST STIM, ... silence ..., SECOND STIM, ... silence ...]
inp = torch.zeros(self.T_total, self.num_channels)
inp[: self.T_stim] = self.key_stim_map[key][0]
T_second_stim = (
self.T_stim
+ self.T_delay
- np.random.randint(-self.T_randomize, self.T_randomize)
)
inp[T_second_stim : T_second_stim + self.T_stim] = self.key_stim_map[key][1]
# supervision signal
tgt = torch.Tensor([self.key_target_map[key]]).long()
return inp, tgt
def __len__(self):
return len(self.key_stim_map)
[3]:
from torch.utils.data import DataLoader
data = TemporalXOR(
T_total=100,
T_stim=20,
T_delay=30,
T_randomize=20,
max_num_spikes=15,
num_channels=16,
)
dataloader = DataLoader(data, batch_size=len(data), shuffle=True)
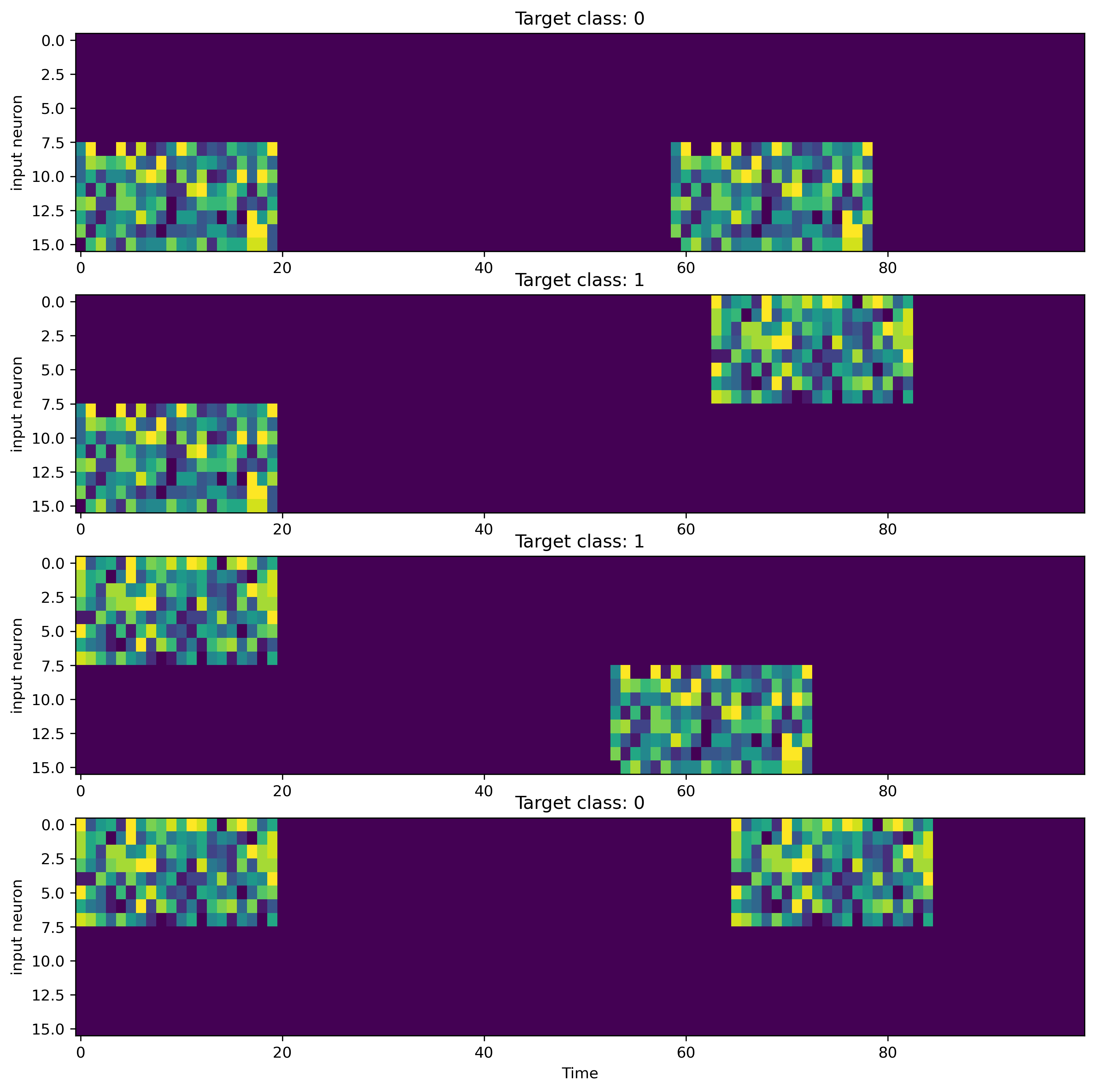
Now that the taks is defined and we created a dataloader, let’s visualize the data.
[4]:
fig = plt.figure(figsize=[12, 12])
for i in range(len(data)):
inp, target = data[i]
ax = fig.add_subplot(len(data), 1, i + 1)
ax.imshow(inp.T, aspect="auto", interpolation="None")
ax.set_ylabel("input neuron")
ax.set_title(f"Target class: {target.item()}")
ax.set_xlabel("Time")
plt.show()
Now let’s define the WaveSense network.
As the problem is simple, we use only 16 neurons per layer and 2 WaveBlocks. We want the time constants in the network as short as possible as long time constants blurr the data unnecessarily. On the other hand, we need long memory in the network so we use one long time constant in the second WaveBlock (dilation = 16).
We can define the number of WaveBlocks and their time constants by the dilations parameter. Remember, the dilated connection in WaveBlock i has two time constants which are calculated as:
tau_syn_0 = base_tau_syn
tau_syn_1 = dilation[i] * base_tau_syn
Finally, WaveSense can low-pass the output of the readout with an exponential kernel (time constant tau_lp). This is not strictly necessary but can help to smooth the gradients.
We can also choose which implementation of the LIF neuron WaveSense should use. The options are:
1) LIFTorch, the most standard LIF dynamics (default)
2) LIFSlayer, speeds up the training drastically but won't be able to be quantized after training
Here, we use LIFTorch as the most standard implementation of the LIF dynamics.
[5]:
from rockpool.nn.modules import LIFTorch # , LIFSlayer
from rockpool.nn.networks.wavesense import WaveSenseNet
from rockpool.parameters import Constant
dilations = [2, 32]
n_out_neurons = 2
n_inp_neurons = data.num_channels
n_neurons = 16
kernel_size = 2
tau_mem = 0.002
base_tau_syn = 0.002
tau_lp = 0.01
threshold = 1.0
dt = 0.001
# - Use a GPU if available
# device = "gpu" if torch.cuda.is_available() else "cpu"
device = "cpu"
model = WaveSenseNet(
dilations=dilations,
n_classes=n_out_neurons,
n_channels_in=n_inp_neurons,
n_channels_res=n_neurons,
n_channels_skip=n_neurons,
n_hidden=n_neurons,
kernel_size=kernel_size,
bias=Constant(0.0),
smooth_output=True,
tau_mem=Constant(tau_mem),
base_tau_syn=base_tau_syn,
tau_lp=tau_lp,
threshold=Constant(threshold),
neuron_model=LIFTorch,
dt=dt,
).to(device)
/home/dylan/rockpool/rockpool/nn/networks/__init__.py:10: UserWarning: This module needs to be ported to teh v2 API.
warnings.warn(f"{err}")
/home/dylan/rockpool/rockpool/nn/networks/__init__.py:15: UserWarning: This module needs to be ported to the v2 API.
warnings.warn(f"{err}")
Now the boilerplate code starts.
We use CrossEntropyLoss as TemporalXOR is a classification task and make use of the Adam optimizer.
[6]:
from torch.nn import CrossEntropyLoss
from torch.optim import Adam
crit = CrossEntropyLoss()
opt = Adam(model.parameters().astorch(), lr=1e-3)
We train this model on the TemporalXOR task for 300 epochs. It is worth noting that we apply CrossEntropyLoss only on the last timestep of the output of the model. We do that because we know that the model had the possibility to integrate enough information about the task at the last time step.
[7]:
from sklearn.metrics import accuracy_score
from tqdm.autonotebook import tqdm, trange
num_epochs = 300
# save loss and accuracy over epochs
losses = []
accs = []
# loop over epochs
t = trange(num_epochs, desc="Training", unit="epoch")
for epoch in t:
# read one batch of the data
for inp, tgt in dataloader:
# reset states and gradients
model.reset_state()
opt.zero_grad()
# forward path
out, _, rec = model(inp.to(device), record=True)
# get the last timestep of the output
# we use the synaptic current of the output layer, as training is more stable
out = rec["spk_out"]["isyn"]
out_at_last_timestep = out[:, -1, :, 0]
# pass the last timestep of the output and the target through CE
loss = crit(out_at_last_timestep.to(device), tgt.squeeze().to(device))
# backward
loss.backward()
# apply gradients
opt.step()
# save loss and accuracy
with torch.no_grad():
pred = out_at_last_timestep.argmax(1)
accs.append(accuracy_score(tgt.squeeze().cpu().numpy(), pred.cpu().numpy()))
losses.append(loss.item())
# print loss and accuracy every 10th epoch
t.set_postfix({"loss": losses[-1], "acc": accs[-1]})
We can visualize the loss and the accuracy over epochs.
[8]:
plt.plot(losses)
plt.yscale("log")
plt.title("Loss")
plt.ylabel("Loss")
plt.xlabel("Epoch")
plt.figure()
plt.plot(accs)
plt.title("Accuracy")
plt.ylabel("Accuracy")
plt.xlabel("Epoch");
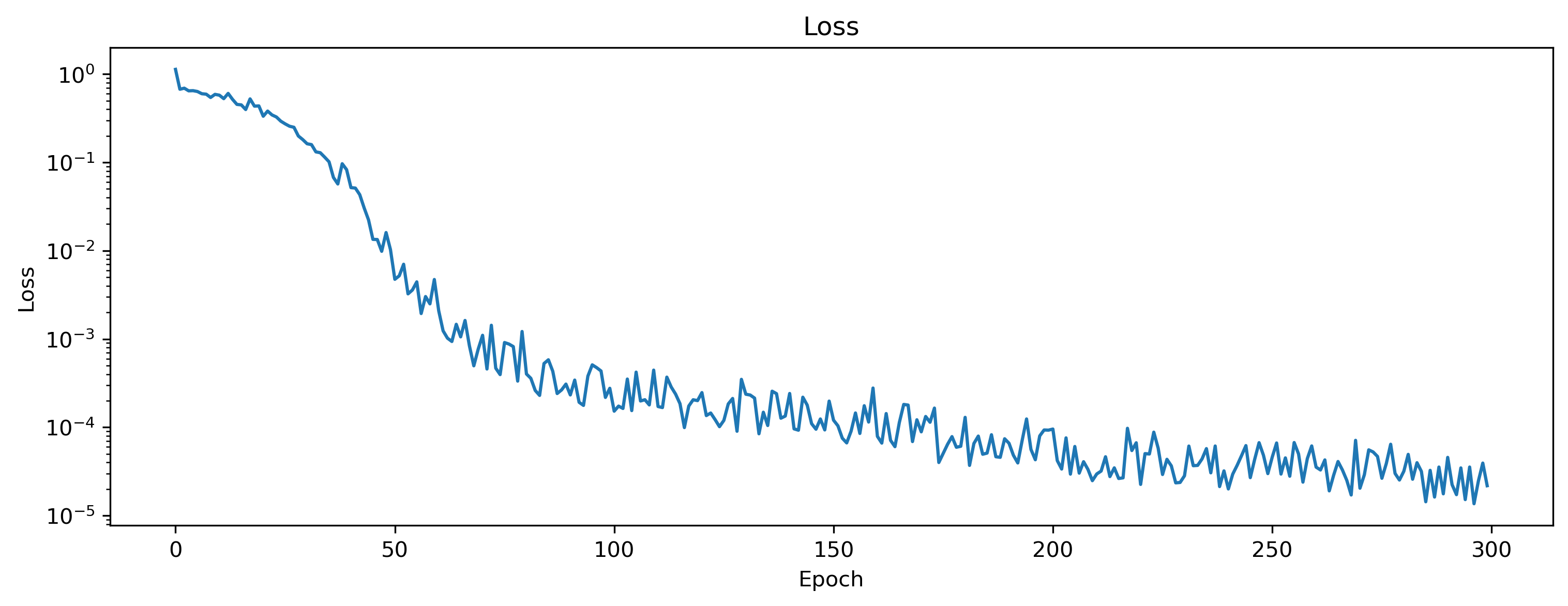
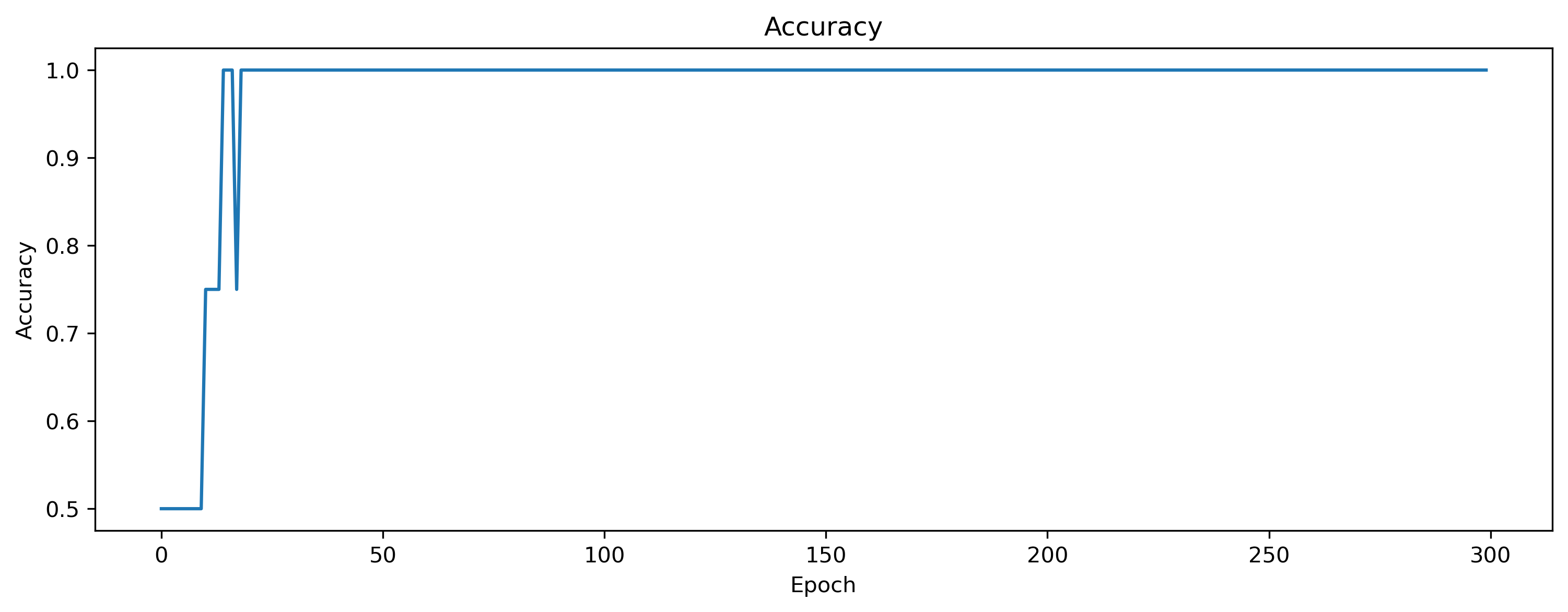
It seems that the model has learned the task successfully. But to make sure, let’s visualize the input, and output of the last batch.
[9]:
fig = plt.figure(figsize=(17, 7))
for i in range(len(data)):
ax = fig.add_subplot(2, len(data), i + 1)
ax.imshow(inp[i].T, aspect="auto", interpolation="None")
ax.set_ylabel("input neuron")
ax = fig.add_subplot(2, len(data), len(data) + i + 1)
ax.plot(out[i, :, 0].detach().cpu().numpy(), label="output_0")
ax.plot(out[i, :, 1].detach().cpu().numpy(), label="output_1")
ax.legend()
ax.set_ylabel("output")
ax.set_xlabel("Time")
plt.show()
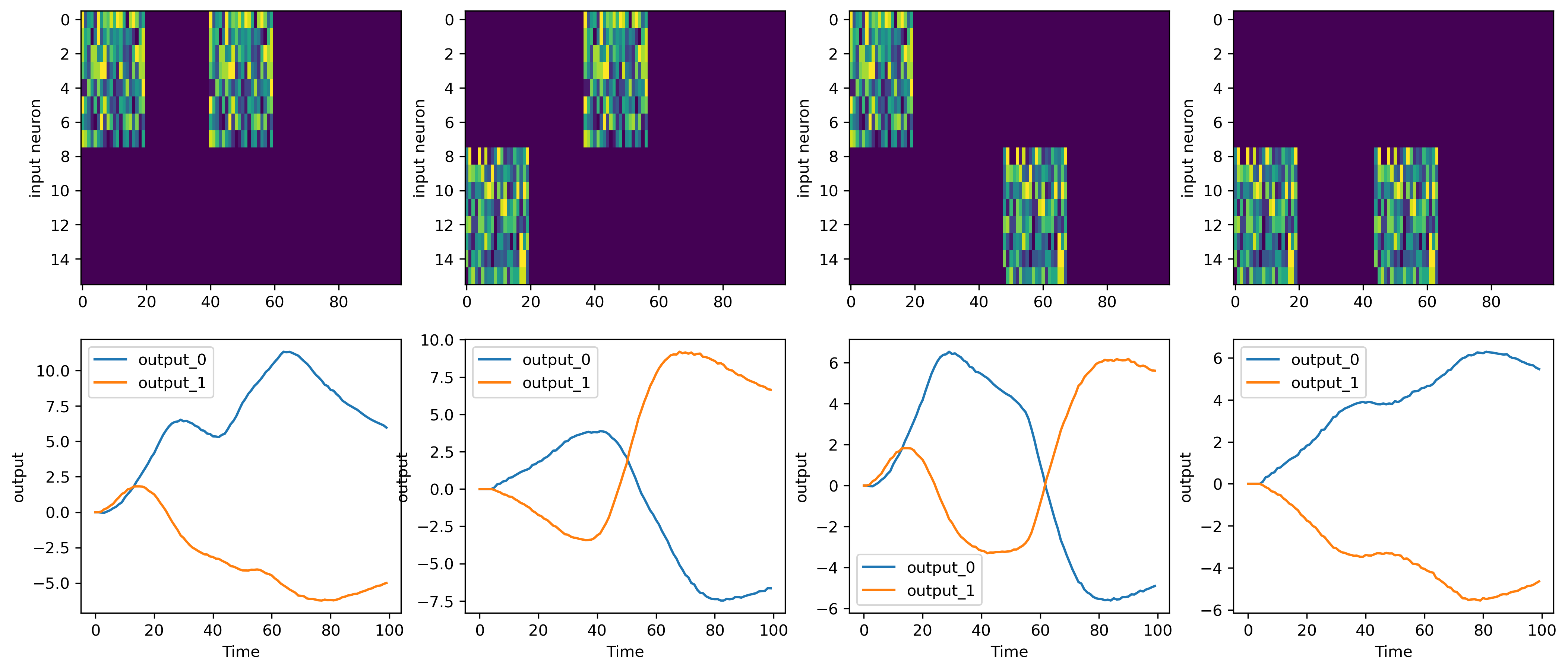
As can be seen, the output at the last timestep predicts the target correctly. Output neuron 0 is more active on the last timestep than output neuron 1 if XOR(inp) == 0 and vice versa.
We can also visualize the activity of each layer in WaveSense by accessing the record dict returned by rockpool on each forward path. We can access the state of each layer (synaptic current and membrane potential) or the spiking output.
Let’s take a look at the spiking output.
[10]:
# collect all spiking output from the recordings
spk_layers = []
for name, d in rec.items():
if "spk" in name and "output" in name:
spk_layers.append([name, d])
elif "wave" in name and not "output" in name:
wave_name = name
for name, d in d.items():
if "spk" in name and "output" in name:
spk_layers.append([wave_name + " " + name, d])
# plot spiking activity over layers
fig = plt.figure(figsize=(16, 20))
for i, (name, layer_rec) in enumerate(spk_layers):
ax = fig.add_subplot(len(spk_layers), 1, i + 1)
img = ax.imshow(layer_rec[0].detach().int().abs().cpu().numpy().T, aspect="auto")
fig.colorbar(img, ax=ax)
ax.set_ylabel(name)
ax.set_xlabel("Time")
plt.show()
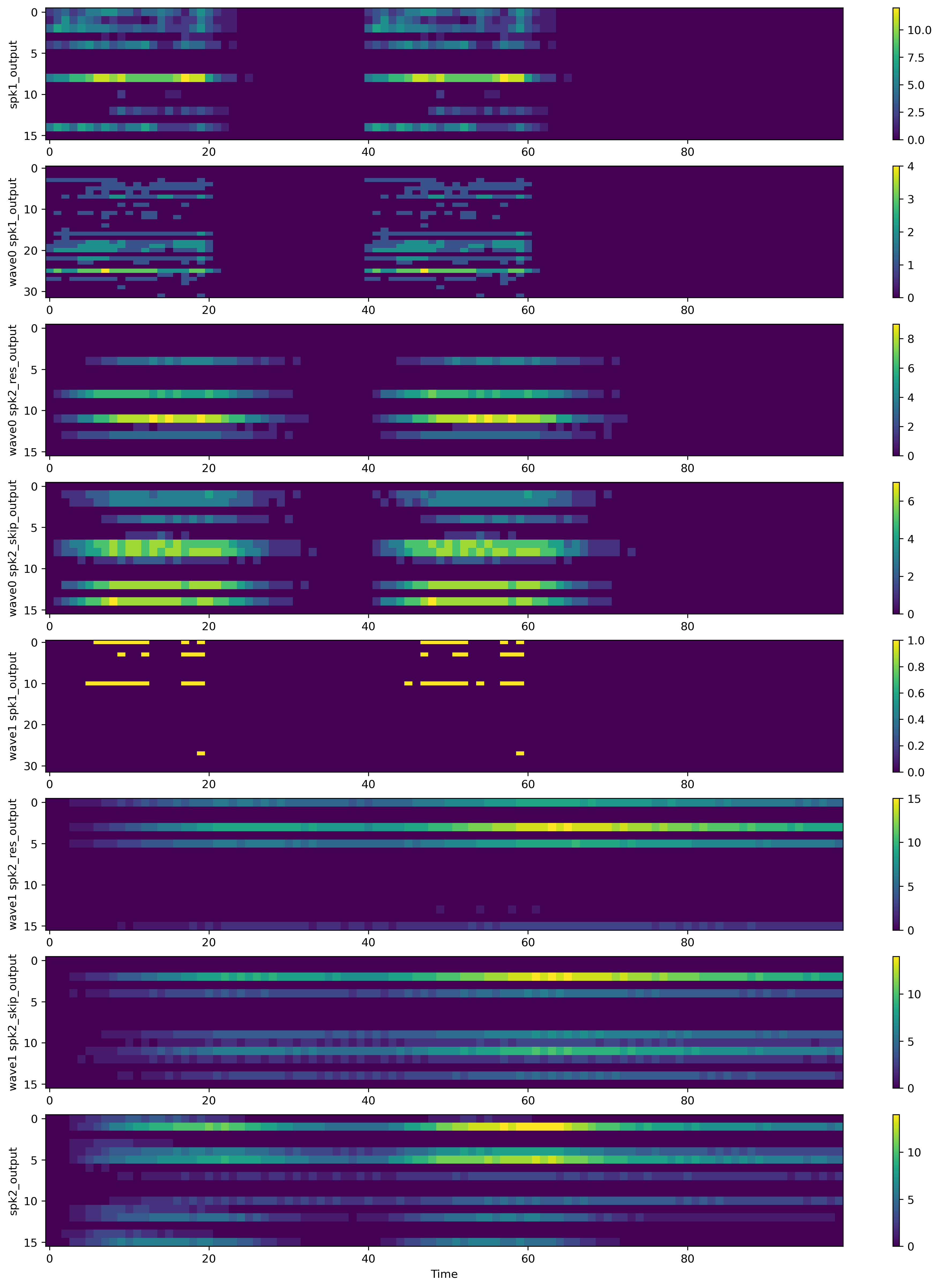
What we can see here is that the first layers (including the first WaveBlock) respond quickly to the stimuli which is expected as the time constants of those layers are short.
The second WaveBlock has the only long time constant in the network and is able to maintain an active state for the whole delay period. This reflects the memory in the network and can be utilized by the readout layer (the last layer).
We can save the model to json format using model.save(path) and load it again after initialization with model.load(path).
[11]:
# save model
# model.save("WaveSense.json")
# load model
# model.load("WaveSense.json")